Robot Tour
Multiple robots capable of traversing through an obstacle course with millimeter precision.
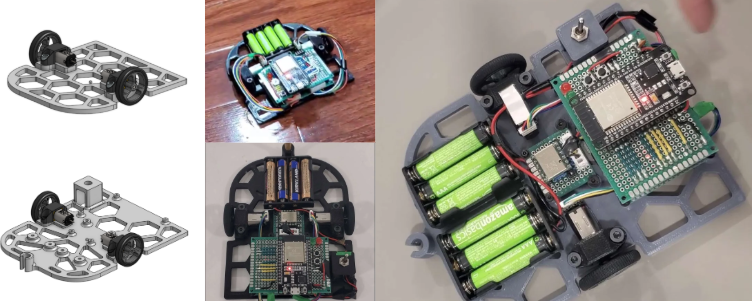
Clinton
Simple differential drive
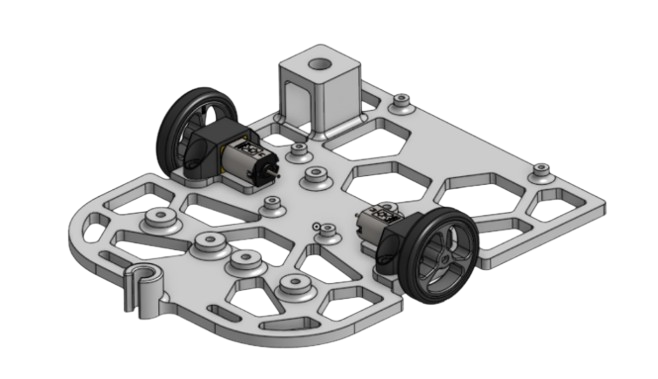
- ESP32 MCU, DRV8874 Motor Driver
- Pure Pursuit implementation
Robert
Simple stepper motor design, first custom PCB & machined chassis
- ESP32 MCU, BMI270 IMU, TMC2209 & A4988 Motor Driver
- SD Card input for path programming, OLED Display
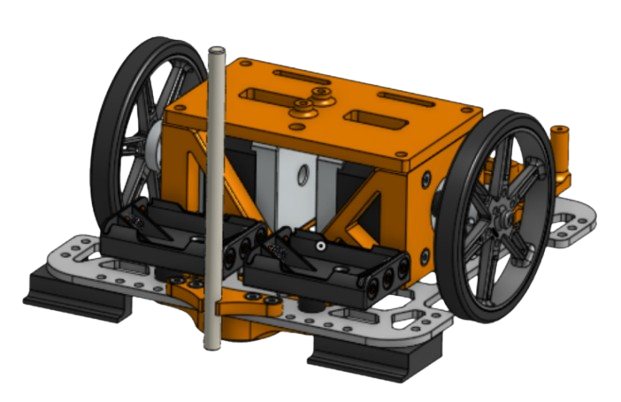
Beter
More complex stepper motor design
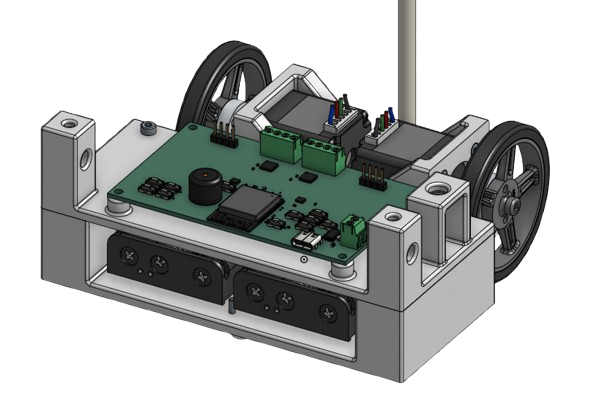
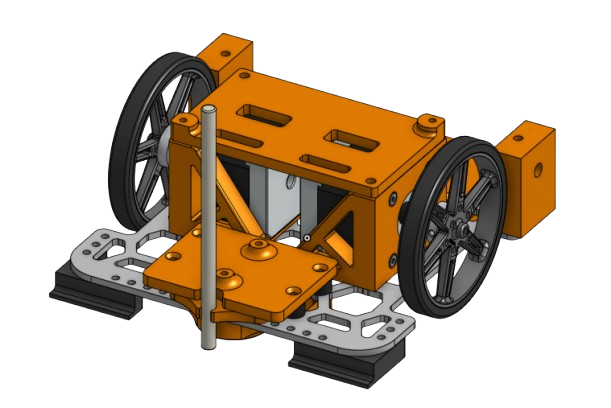
- ESP32 MCU, TMC2209 Motor Driver, BMI270 IMU
- Quadature Encoder + OLED for user interface
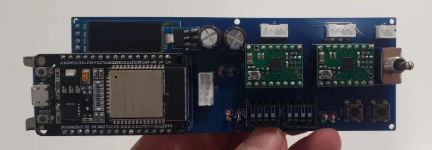
- All-in-one PCB board
- Same board used on two different chassis
- Dual IMU integration
Beter PCB


Robert PCB
Iterative Design of Robert
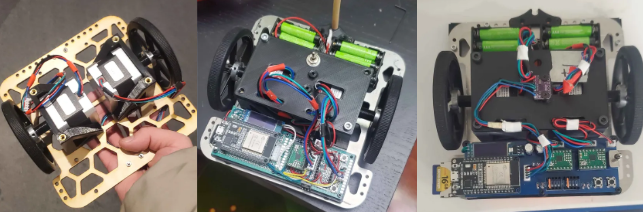
Iterative Design of Clinton